Technologies and Devices
A number of my projects have involved the development of physical technologies and software

EXO22

Individuals with Spinal Cord Injury (SCI) - particularly those with complete injuries - rely heavily on wheelchairs to mobilise in the community. However, this mode of transport has a number of practical, physiological and psychological shortcomings. Exoskeletons can help address this - for example, by allowing their users to climb up stairs, or just allowing the individual to have a conversation at eye level.
However, devices are still very much under development, with many barriers still present before they can be realistically adopted as community mobilisation devices. EXO22 is a platform for further developing these capabilities, with powerful motors and 6 degrees of freedom - simplifying stair climbing and enabling sidestepping - to allow for more complex movements to be performed.
CANopen Robot Controller (CORC)



Development of robotic devices for research is typically difficult and time-consuming, with code often written from scratch, with very little re-use. CORC is a free and open source robotic development software stack, written in C++, which facilitates and accelerates development for any robot with CANopen hardware.
Initiated by myself at the University of Melbourne, the platform has (so far, and to my knowledge) been used in a number of other institutions in Australia, the USA, Scotland and Singapore with research groups sharing code across more than 4 robotic platforms.
See more information on the Github Here
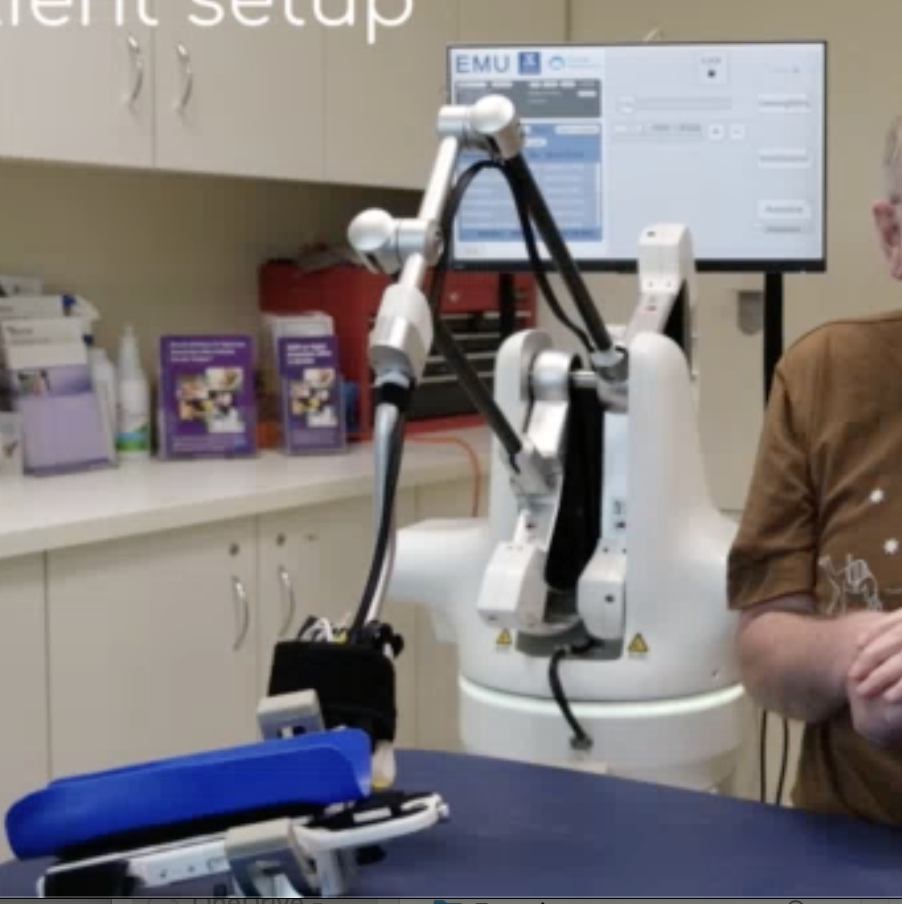
EMU - An upper limb rehab robot




Millions of stroke survivors do not receive sufficient therapy due, in part, to its physical demands on the therapist, and the repetitive and boring nature of the exercises. The EMU is a robotic device designed to assist with therapy of the upper limb - providing programmable, physical support, along with
The EMU has seen numerous iterations and prototypes within the University of Melbourne, before its eventual commercialisation to the ArmMotus EMU by Fourier Intelligence.
Gait Aid Measurement Device




Gait aids are typically used by those with gait impairments or balance issues - providing an additional point of support on the ground to improve their walking capabilities.
The GAMD is a software package (within a phone application) and a concept prototype, designed to help measure how the user is walking. It gathers information which can be used to assess risk of falls, whether the individual is walking safely, or whether their gait patterns are changing in response to therapy that they are providing.